








- 品牌/商標:1746-IO12
- 企業類型:貿易商
- 新舊程度:全新
- 產品型號:1746-IO12
- 原產地:1746-IO12
1746-IO12
1746-IO12
掃地機器人的自主尋路可以分為兩種:隨機覆蓋法和路徑規劃式。
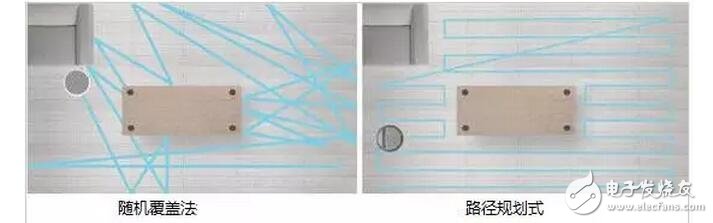
| 隨機覆蓋法
隨機覆蓋法,有人也稱為隨機碰撞式導航,但這并非是指機器人真正與環境中的物體產生碰撞,也非毫無章法的在地板上隨機移動,換言之在工程操作中“隨機”也是一個難以達到要求,隨機覆蓋法是指機器人根據一定的移動算法,如三角形、五邊形軌跡嘗試性的覆蓋作業區,如果遇到障礙,則執行對應的轉向函數。這種方法是一種以時間換空間的低成本策略,如不計時間可以達到 100%覆蓋率。隨機覆蓋法不用定位、也沒有環境地圖,也無法對路徑進行規劃,所以其移動路徑基本依賴于內置的算法,算法的優劣也決定了其清掃質量與效率的高低。
美國iRobot公司研發的iRobot Roomba 3-8系列是隨機碰撞尋路系統的典型代表。
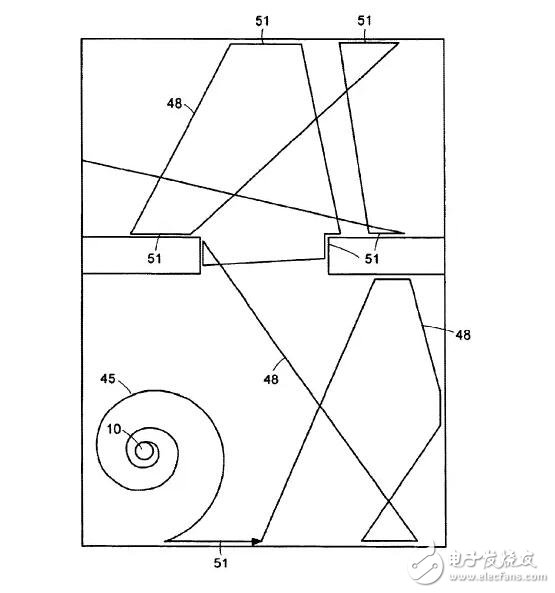
據稱,其采用iAdapt智能化清掃技術的技術,這是一種軟、硬件相結合的智能化AI清掃系統,硬件由Roomba前方的若干紅外探測器、底部灰塵偵測器和落差傳感器、毛刷膠刷邊刷測速系統等等組成,通過Roomba的硬件傳回的信息,iRobot自身的軟件可以對回傳信息進行分析,根據紅外回傳信息的強度、范圍、高度、轉速、電流大小、阻力等參數,計算出前方障礙物大致形狀,再經過軟件的處理運算,得出的結果就是Roomba下一步清潔方式,Roomba以每秒60次的速度計算周邊障礙物的情況,同時根據所處環境作出40余種清掃動作,如圍繞、折返、螺旋、貼邊、轉身等等。
1746-IO12
Artikelbezeichnung
Simatic S5 Steckleitung 6ES5 721-0BB60
Simatic S5 CPU928B 6ES5 928-3UB11 6ES5928-3UB11
10 x ASAHI Temperaturschal?ter / Begrenzer 90°C
VIPA Schnittstellenb?augruppe SSM-BG43
Telemecanique ALTISTART 3 ATS23PD30N Sanftanlasser
Simatic OP5 COROS 6AV3 505-1FB12
Simatic S5 IM308C 6ES5 308-3UC11 6ES5308-3UC11
Simatic S5 WF470B 6FM1470-3BA21
Micronor Motor Potentiometer MG2G 500R 0501.24.025
ABB Sicherheitsscha?ltger?t GHCR0005
Siemens Leistungsschalt?er 3VU1300-1MH00 OVP
ABB Lasttrennschalt?er ILTS 1 GHVR0011 ovp
ABB FI Fehlerstrom-Sch?utzschalter F374-25/0,5H ovp
Mettler Toledo Ingold ph-Transmitter 2500 ovp
GF Signet Flow Monitor 3-5500 ovp
Kl?ckner Moeller Baustein ETS4-VS3
Pepperl+Fuchs Steuerkreis KHD2-RW1/Ex1
Kl?ckner Moeller PS416 Kompletteinheit CPU-300
Kl?ckner Moeller PS416 CPU-300
Kl?ckner Moeller PS416 NET-400 SUCOnet










