







- 企業類型:制造商
- 新舊程度:全新
- 原產地:北京
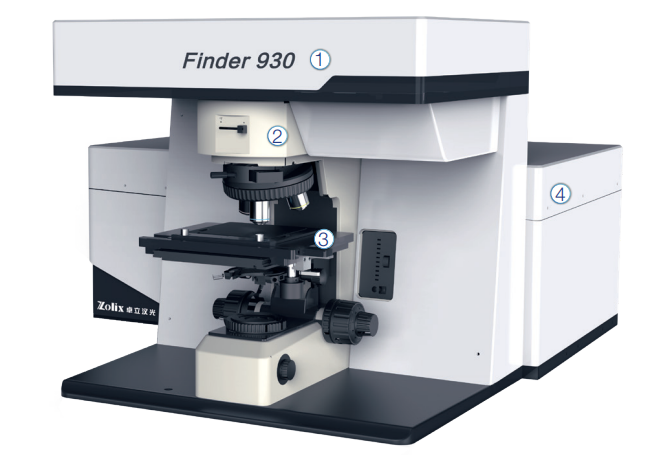
全自動化拉曼光譜分析系統Finder 930
從 2003 年步入拉曼光譜領域至今,卓立漢光的技術實力不斷 沉淀,拉曼產品也在推陳出新,公司產品在材料、地質、生 物、化學、醫藥、食品、刑偵等領域得到應用。 經過與不同行業不同客戶的長期探討,我們推出了全新一代的 Finder 930 拉曼測量系統,旨在打造一臺屬于國人自己的高性 能、高穩定性、高性價比的國產激光共聚焦拉曼光譜儀。 我們汲取了前幾代產品的成功經驗,對 Finder 930 的硬件和軟 件上進行了全方位升級:

1.上光路: 全自動四路激光器切換,可內置三路常用激光器及濾 光片組,預留第四路 ( 外置 ) 激光器輸入接口。 正置科研級金相顯微鏡,標配落射式明暗場照明,其 他照明方式可升級。
2.拉曼顯微鏡: 正置科研級金相顯微鏡,標配落射式明暗場照明,其他照明方式可升級。
3.電動樣品臺:75x50mm 行程高精度電動載物臺,1μm 定位精度。
4.320mm 光譜儀:F/4.2 高通光量影像校正光譜儀,1x10-5 雜散光抑制比。
使用了卓立漢光全新一代的影像校正光譜儀,成像質量更加優異, 波長重復性和準確性更優異,讓您的實驗數據更加可靠。
引入了高精度的自動化電動控制系統,智能控制激光切換、激光功 率、共焦針孔大小,光路自動校正使設備更加智能,操作更加 簡單,也讓設備穩定性大幅提升,開機即用,不需要專人維護。
全新架構的軟件,兼容熒光Mapping、拉曼Mapping、熒光壽命成像、 高光譜數據處理,簡單易用,讓您的數據分析更加方便快捷。
全全自動化拉曼光譜分析系統Finder 930 ,是一臺具有高性能,高可靠性,高智能化 的通用型分析儀器,為您的研究保駕護航。

全自動化拉曼光譜分析系統Finder 930 系統特點
共焦性能優異
當一個點光源(通常是激光)通過物鏡聚焦在樣品上,這一點所成的像通過探測 針孔被探測器所檢測,此時照明針孔和探測針孔相對于物鏡焦平面是共軛的,即 為共聚焦。在共聚焦顯微系統中,只有被照明樣品的散射光信號會被接受,這就 保證了橫向空間分辨率;而位于光源照明區域內,但不在焦平面上的樣品信號會 由于離焦而被探測針孔(空間濾波器)強烈地衰減,這也就保證了縱向空間分辨率。 因此,當我們將樣品沿著激光入射的方向上下移動時,可以將激光聚焦于樣品的 不同層,以實現對樣品的剖層分析。共聚焦的另外一個優點是對于透明,半透明 樣品,或者有較強熒光和黑體背景的樣品來說,有較好的背景抑制的功能。

如上圖所示,在寬場成像(A)中,離焦光線會顯著地降低圖像的分辨率和對比度; 但是在共聚焦成像系統(B)中,利用針孔去除非聚焦光線,可以形成對比度和 分辨率更優質的圖像。

系統穩定性高
在一個有眾多光學元件的光學系統里面,光學元件調節架的溫漂,光路切換的重復性等問題,直接影響系統的穩定性,反映到顯微共聚 焦拉曼光譜系統上直觀的現象就是激光光斑的漂移。而激光光斑的漂移會帶來諸多問題,直接的影響就是共聚焦性能的降低以及系 統靈敏度的下降,其次光斑漂移會對偏振等對光路準直性要求極高的實驗帶來影響,因此保證系統的穩定性是設計一切光學系統的首要 問題。
1. 溫度濕度對穩定性的影響 在光學系統中,光路越長,反射鏡越多,那么光學調整架由于溫 度濕度影響而產生的漂移量就越大,激光光斑的漂移就會越嚴重。 從共聚焦原理可以看到,共聚焦就是要把激光光斑成像到針孔上, 激光光斑漂移就意味著針孔上的光斑像漂移,因此通光量就會顯 著下降。為了避免信號強度受到影響,因此只能把針孔變大,進 而影響共聚焦性能。為了解決這個問題,Finder930 采用了激光器 內置的設計,大程度減小光路長度,同時采用受溫度濕度影響形變小的航空鋁材設計制作光學元件調整架。
2. 光路切換對穩定性的影響 當共聚焦拉曼系統為了滿足不同的實驗需求配置多路激光器時, 就需要進行激光器和濾光片的切換,因切換過程對定位精度和重 復定位精度都有很高的要求,因此一般采用電動切換。Finder 930 在設計初期,便巧妙地將多個波長的激光器通過二向色鏡進行合 束并固化,在更換激光器波長時,軟件會自動控制激光器的開關, 并自動切換到相應的濾光片。以上的設計,保證了系統可以長期(數 月)穩定工作,而不需要經常調整光路。

全自動化拉曼光譜分析系統Finder 930 光譜成像能力優越
從前面的原理介紹得知,拉曼光譜是用來表征物質化學成分以及研究分子性質如應力,極性,及晶體質量等屬性的一種工具。 而拉曼 Mapping 或者叫拉曼成像就是將研究的對象可視化的一種手段。用戶可以直接從 Mapping 圖像上得到如化學成分的空間 分布,非常直觀。 既然說 Mapping 是顯微圖像的一種,那么 Mapping 就必須有顯微圖像應該具備的特點,即就是空間分辨率和成像速度。
1.空間分辨率
空間分辨率分為橫向 (XY 平面 ) 和縱向 (Z 軸 ) 兩個指標, 橫向分辨率主要受物鏡數值孔徑 (NA),激光器波長,共焦針 孔的尺寸以及激光器光斑質量的影響,而縱向分辨率也就是 我們講的共聚焦性能,除了上面幾個因素外,還跟系統的優 化設計有很大的關系。經過優化過后的 Finder930,可以在 100X,0.9NA 物鏡,532nm 激光測試條件下,達到橫向空 間分辨率 0.5μm,縱向空間分辨率 1μm@10μm 針孔。而我 們的所有 Mapping 均可以在共聚焦情況下完成,因此保證了 Mapping 結果的空間分辨率。

2.成像速度
Mapping 成像速度是另外一個重要的參數,主要取決于 系統的靈敏度,電動臺的精度以及軟件的處理能力。靈敏度 要夠高,單光譜的采集時間才可以更短,才能從本質上提升 Mapping 速度,而電動臺的高精度主要是防止圖像畸變,軟 件的 Mapping 邏輯是為了提升 Mapping 速度,做到邊走邊 采的同步功能,軟件的實時處理能力比如噪聲抑制,背景扣 除等功能,可以從弱信號、復雜信號當中把拉曼光譜提取出 來實時顯示。 2.1. 系統靈敏度 : 鍍銀反射鏡,可升級寬譜介質膜 ; 光譜 儀可做鍍銀升級 ;F/4.2 通光口徑 ;CCD 采用深制冷,背照式 深耗盡芯片,峰值量子效率 >90%;1.48MHz 讀出速度,可實 現一秒鐘 100 張以上光譜采集速度。 2.2. Mapping 采集圖像時,電動位移臺先從原點移動至 采集目標區域零點,然后依照程序設計進行逐點逐行掃描, 掃描結束后,電動位移臺回到掃描區域的中心點。此時可以 對采集到光譜進行數據處理,得到理想的拉曼Mapping圖像。
全自動化拉曼光譜分析系統Finder 930 系統技術規格

