





 詢價
詢價














- 質保:一年
- 特點:測量精準
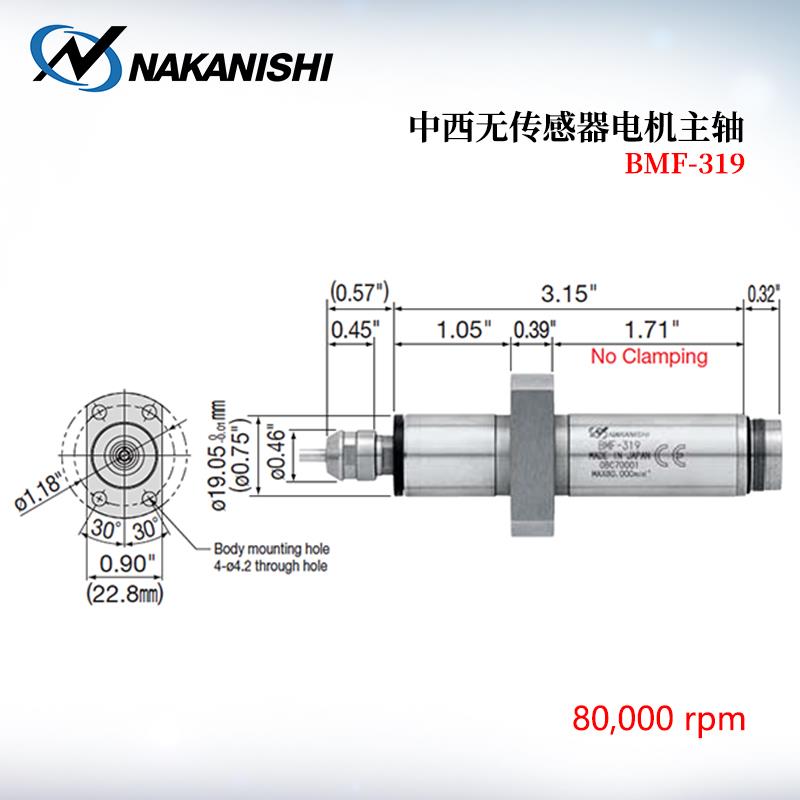
無傳感器電機主軸是一種將電機與機床主軸融為一體,且不依賴外部位置或速度傳感器來實現控制的技術。以下是關于它的介紹:
無傳感器電機主軸工作原理
反電動勢法:在無刷直流電機中,當轉子旋轉時,定子繞組會產生反電動勢。通過檢測反電動勢的過零點等特征,可以估算出轉子的位置和轉速,從而實現換相控制。例如,在光伏水泵系統中應用的直流無刷電機,就常采用反電勢法來實現電子換相,不過在靜止或低速狀態下反電勢值為 0 或很小,通常采用三段式起動方式來解決這個問題。
模型參考自適應法(MRAS):以電機本身的數學模型為參考模型,建立一個可調模型。通過比較兩個模型的輸出,利用自適應算法調整可調模型的參數,使可調模型的輸出盡可能接近參考模型的輸出,最終得到轉子的轉速與位置觀測值。
滑模觀測器法(SMO):利用滑模變結構控制理論,設計一個滑模觀測器來觀測電機的狀態變量,如轉子位置和速度。即使系統存在不確定性和干擾,滑模觀測器也能保證觀測誤差在有限時間內收斂到零。但這種方法存在高頻抖震問題。
無傳感器電機主軸特點
優點:無傳感器電機主軸省掉了傳感器及相關的安裝結構,使電機主軸的結構更加緊湊、簡單,降低了成本和安裝復雜度;沒有傳感器,也就不存在傳感器故障的問題,提高了系統的可靠性和穩定性,尤其適用于高溫、潮濕、多塵等惡劣環境;由于減少了傳感器帶來的信號傳輸延遲和干擾,系統的動態響應速度可能會有所提高。
缺點:在低速運行時,反電動勢較小,檢測精度會受到影響,導致控制性能下降;需要較為復雜的算法來估算轉子位置和速度,對控制器的運算能力要求較高;受電機參數變化和外界干擾的影響較大,例如電機繞組電阻、電感等參數會隨溫度變化,從而影響估算精度。


無傳感器電機主軸應用領域
數控機床:可實現高精度加工,減少了因傳感器故障導致的加工誤差,提高了加工效率和產品質量。
機器人:有助于降低機器人關節的體積和重量,提高機器人的運動靈活性和精度,同時增強了系統在復雜工況下的可靠性。
電動車輛:使驅動系統更加緊湊和可靠,提升了車輛的空間利用率和續航能力,在一些對可靠性要求較高的特種車輛中應用前景廣闊。
航空航天:減輕了飛行器的重量,提高了系統的可靠性,滿足了航空航天領域對設備輕量化和高可靠性的嚴格要求。









